

HOWO 6x4 20cbm ļ”¼ņ¢┤ ļĪ£ļŹö ĒŖĖļ¤ŁņØĆ ĒÅÉĻĖ░ļ¼╝ Ļ┤Ćļ”¼ļź╝ ņ£äĒĢ┤ ņäżĻ│äļÉ£ Ļ░ĢļĀźĒĢśĻ│Ā ĒÜ©ņ£©ņĀüņØĖ ņ░©ļ¤ēņ×ģļŗłļŗż. Ļ▓¼Ļ│ĀĒĢ£ 6x4 ĻĄ¼ļÅÖ ņŗ£ņŖżĒģ£Ļ│╝ 20cbmņØś ļīĆņÜ®ļ¤ē ņō░ļĀłĻĖ░ ņłśĻ▒░ ļ░Å ņĢĢņČĢ ĻĖ░ļŖźņØä Ļ░¢ņČöĻ│Ā ņ׳ņŖĄļŗłļŗż. ņĀäĻĖ░-ĻĖ░Ļ│ä-ņ£ĀņĢĢ ĒåĄĒĢ® ĻĖ░ņłĀņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ĒÜ©ņ£©ņĀüņØĖ ņō░ļĀłĻĖ░ Ēł¼ņ×ģ, Ēīīņćä ļ░Å ņĢĢņČĢņØä ņŗżĒśäĒĢ®ļŗłļŗż. Ļ░ĢļĀźĒĢ£ ņĀüņ×¼ ņÜ®ļ¤ēĻ│╝ ņĮżĒī®ĒŖĖĒĢ£ ļööņ×ÉņØĖņ£╝ļĪ£ ļÅäņŗ£ ļ░Å ĻĄÉņÖĖ ņ¦ĆņŚŁņŚÉņä£ ņé¼ņÜ®ĒĢśĻĖ░ņŚÉ ņØ┤ņāüņĀüņ×ģļŗłļŗż.
 ņĀłņ░©
ņĀłņ░©
1 ņśżņØ╝ ĒÄīĒöäļź╝ ņŗ£ļÅÖĒĢśņäĖņÜö
├óŌĆö ņśżņØ╝ ĒÄīĒöäņÖĆ ņśżņØ╝ Ēā▒Ēü¼ ņé¼ņØ┤ņØś ņśżņØ╝ ĒØĪņ×ģ ļØ╝ņØĖņŚÉ ņ׳ļŖö ļ│╝ ļ░ĖļĖīļź╝ ņŚĮļŗłļŗż.
├óŌĆö ņåŹļÅä ļĀłļ▓äĻ░Ć ņżæļ”Į ņ£äņ╣śņŚÉ ņ׳ņŖĄļŗłļŗż.
├óŌĆö ļ®öņØĖ ņĀ£ņ¢┤ĒīÉņØś ņĀäņøÉ ņŖżņ£äņ╣śļź╝ ņ╝£ļ®┤ ņĀäņøÉ Ēæ£ņŗ£ļō▒ņØ┤ ņ╝£ņ¦æļŗłļŗż.
├óŌĆö ņäĆņŗ£ ļ¦żļē┤ņ¢╝ņŚÉ ļö░ļØ╝ ņŚöņ¦äņØä ņŗ£ļÅÖĒĢśĻ│Ā ņĀüņĀłĒĢśĻ▓ī Ļ░ĆņåŹĒĢśņäĖņÜö.
Ēü┤ļ¤¼ņ╣śļź╝ ļ░¤ņØĆ ņāüĒā£ļĪ£ ņ£Āņ¦ĆĒĢśĻ│Ā, ļ│ĆņåŹ ļĀłļ▓äļź╝ ņżæļ”Į ņ£äņ╣śņŚÉ ļåōņØĆ Ēøä, ļÅÖņŗ£ņŚÉ PTO ņŖżņ£äņ╣śļź╝ ļłäļź┤Ļ│Ā ļģĖļĖīļź╝ "ON" ņ£äņ╣śļĪ£ ļÅīļ”¼ļ®┤ ļ®öņØĖ ņĀ£ņ¢┤ĒīÉņØś PTO Ēæ£ņŗ£ļō▒ņØ┤ ņ╝£ņ¦æļŗłļŗż. ļŗ©, ĻĖ░ņ¢┤Ļ░Ć ņä£ļĪ£ ļČĆļö¬Ē׳ļŖö ņåīļ”¼Ļ░Ć ļōżļ”¼ļ®┤ Ēü┤ļ¤¼ņ╣śļź╝ ļ░¤Ļ│Ā PTO ļģĖļĖīļź╝ ņøÉļל ņ£äņ╣śļĪ£ ļÅīļ”░ Ēøä ļŗżņŗ£ ņ×æļÅÖĒĢ┤ ļ│┤ņŗŁņŗ£ņśż.
├óŌĆö Ēü┤ļ¤¼ņ╣śļź╝ ņ▓£ņ▓£Ē׳ ļåōņ£╝ļ®┤ ņśżņØ╝ ĒÄīĒöäĻ░Ć ļé«ņØĆ ņ×æļÅÖņØīņØä ļé┤ļ®░, ļŗżļźĖ ņåīņØīņØ┤ ņŚåļŗżļ®┤ ņĀĢņāü ņ×æļÅÖ ņāüĒā£ļĪ£ ļōżņ¢┤Ļ░ä Ļ▓āņ×ģļŗłļŗż.
2 ņō░ļĀłĻĖ░ Ēł¼ņ×ģ ļ░Å ĒĢśņŚŁ ņĀä ņżĆļ╣äņé¼ĒĢŁ
ņśżņØ╝ ĒÄīĒöäĻ░Ć 3~5ļČä ļÅÖņĢł ņĢłņĀĢņĀüņ£╝ļĪ£ ņ×æļÅÖĒĢ£ Ēøä, ņŻ╝ ņĀ£ņ¢┤ĒīÉņŚÉņä£ ļŗżņ¢æĒĢ£ ņ×æņŚģņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.

ņÜ┤ņśü ņ▓┤ņĀ£
1 ĒĢĖļōż ņĪ░ņ×æ
ĒĢĖļōż ņ×æļÅÖ ņŗ£ņŖżĒģ£ņØä ņé¼ņÜ®ĒĢśļ®┤ ņ£ĀņĢĢņŗØ ļŗżļ░®Ē¢ź ļ░ĖļĖīļź╝ ĒĢĖļōżļĪ£ ņ×æļÅÖĒĢśņŚ¼ ļ¬©ļōĀ ļ®öņ╗żļŗłņ”śņØä Ļ░£ļ│äņĀüņ£╝ļĪ£ ņ×æļÅÖņŗ£Ēé¼ ņłś ņ׳ņŖĄļŗłļŗż. ņØ┤ ņ×æļÅÖ ļ¬©ļō£ļŖö ņ£Āņ¦Ć ļ│┤ņłś ļ░Å ļööļ▓äĻ╣ģņŚÉ Ēü░ ĒÄĖņØśņä▒ņØä ņĀ£Ļ│ĄĒĢĀ ļ┐Éļ¦ī ņĢäļŗłļØ╝, ņé¼ņÜ® ņżæ ņé¼Ļ│Āļéś Ļ│Āņן ļ░£ņāØ ņŗ£ ņłśļÅÖņ£╝ļĪ£ ņ×æļÅÖĒĢśņŚ¼ ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢĀ ņłśļÅä ņ׳ņŖĄļŗłļŗż.
2 ņłśļÅÖ/ņ×ÉļÅÖ ņ×æļÅÖ
Ēøäļ®┤ ņĪ░ņ×æ Ēī©ļäÉņØś "ņłśļÅÖ" ļ░Å "ņ×ÉļÅÖ" ļ▓äĒŖ╝ņØĆ ņō░ļĀłĻĖ░ ņĀüņ×¼ ņāüĒÖ®ņŚÉ ļö░ļØ╝ ņĀäĒÖśĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ļæÉ Ļ░Ćņ¦Ć ņĀäņ×É ņĀ£ņ¢┤ ņ×æļÅÖ ļ¬©ļō£ļź╝ ņäĀĒāØĒĢśņŚ¼ ĒĢ┤ļŗ╣ ņĀüņ×¼ ņ×æņŚģņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
3 ļĪ£ļö® ņ×æņŚģ
"ņĀüņ×¼" ņ×æņŚģ ņĀäņŚÉ ĒĢäļ¤¼Ļ░Ć ņĀ£ņ×Éļ”¼ņŚÉ ņל ļōżņ¢┤Ļ░öļŖöņ¦Ć, ņ×ĀĻĖł ĒøäĒü¼Ļ░Ć ņĀ£ļīĆļĪ£ Ļ▒ĖļĀĖļŖöņ¦Ć ĒÖĢņØĖĒĢśņŗŁņŗ£ņśż. ĒÖĢņØĖ Ēøä, ņÜ┤ņĀäņäØ ļ®öņØĖ ņĀ£ņ¢┤ĒīÉņØś ņ×æļÅÖ ņĪ░Ļ▒┤ ņäĀĒāØ ļ▓äĒŖ╝ņØä "ņĀüņ×¼" ņ×æņŚģ ļ¬©ļō£ļĪ£ ņĀäĒÖśĒĢśĻ│Ā ņ░©ļ¤ē Ēøäļ®┤ņØś ņśżļźĖņ¬Į ņ╗©ĒŖĖļĪż ļ░ĢņŖżņŚÉņä£ ļŗżņØī ņ×æņŚģņØä ņłśĒ¢ēĒĢśņŗŁņŗ£ņśż.

4 ĒĢ£ ņé¼ņØ┤Ēü┤
ĒĢäļ¤¼ ņ╗żļ▓äņØś ĒĢĖļō£ĒÆĆ ļ░ĖļĖīļź╝ ņŚ┤Ļ│Ā ĒĢäļ¤¼ ņ╗żļ▓äļź╝ ņŚĮļŗłļŗż. "1ņé¼ņØ┤Ēü┤" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ĒĢäļ¤¼Ļ░Ć ņŖżĒü¼ļĀłņØ┤ĒŹ╝ ĒÜīņĀä ŌåÆ ņŖ¼ļØ╝ņØ┤ļō£ ĒöīļĀłņØ┤ĒŖĖ ĒĢśĻ░Ģ ŌåÆ ņŖżĒü¼ļĀłņØ┤ĒŹ╝ ļłäļ”ä ŌåÆ ņŖ¼ļØ╝ņØ┤ļō£ ĒöīļĀłņØ┤ĒŖĖ ņāüņŖ╣ ņł£ņä£ļĪ£ 1ņé¼ņØ┤Ēü┤ņØä ņÖäļŻīĒĢśĻ│Ā ņŗ£ņ×æ ņ£äņ╣ś(ņŖżĒü¼ļĀłņØ┤ĒŹ╝ ļłäļ”ä, ņŖ¼ļØ╝ņØ┤ļō£ ĒöīļĀłņØ┤ĒŖĖ ņāüņé¼ņĀÉ)ņŚÉ ļ©Ėļ¼┤ļ”ģļŗłļŗż. ņĢłņĀäĒĢ£ ņāØņé░ņØä ļ│┤ņןĒĢśĻ│Ā ņןļ╣äņØś ņĀäļĀź ņåīļ╣äļź╝ ņĀłĻ░ÉĒĢśĻĖ░ ņ£äĒĢ┤ "1ņé¼ņØ┤Ēü┤" ņ×æļÅÖņØä ĻČīņןĒĢ®ļŗłļŗż.
5 ņŚ░ņåŹ ņé¼ņØ┤Ēü┤
ņō░ļĀłĻĖ░ļź╝ ĒĢäļ¤¼ņŚÉ ļ╣Āļź┤Ļ│Ā ņŚ░ņåŹņĀüņ£╝ļĪ£ Ēł¼ņ×ģĒĢśļŖö Ļ▓ĮņÜ░, ņśłļź╝ ļōżņ¢┤ ļŗżļźĖ ņןļ╣äļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ņō░ļĀłĻĖ░ļź╝ ĒĢäļ¤¼ļĪ£ ņŚ░ņåŹņĀüņ£╝ļĪ£ ņÜ┤ļ░śĒĢśļŖö Ļ▓ĮņÜ░, "ņŚ░ņåŹ ņé¼ņØ┤Ēü┤" ņ×æļÅÖ ļ¬©ļō£ļź╝ ņé¼ņÜ®ĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż. ņØ┤ Ļ▓ĮņÜ░ "ņŚ░ņåŹ ņé¼ņØ┤Ēü┤" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ 3.4.4ņŚÉ ņäżļ¬ģļÉ£ ņé¼ņØ┤Ēü┤ Ļ│╝ņĀĢņØ┤ ņ×ÉļÅÖņ£╝ļĪ£ ļ░śļ│ĄļÉ®ļŗłļŗż.
6 ņĀĢņ¦Ć
ņĀĢņ¦Ć ļ░®ļ▓ĢņØĆ ļæÉ Ļ░Ćņ¦ĆĻ░Ć ņ׳ņŖĄļŗłļŗż. ĒĢśļéśļŖö ņØ╝ļ░ś ņĀĢņ¦Ć("ņé¼ņĀä ņĀĢņ¦Ć")ņØ┤Ļ│Ā, ļŗżļźĖ ĒĢśļéśļŖö "ļ╣äņāü ņĀĢņ¦Ć"ņ×ģļŗłļŗż. ņ¢┤ļ¢ż ļ░®ņŗØņ£╝ļĪ£ļōĀ ņČ®ņĀä ņ×æņŚģņØä ļ®łņČś ĒøäņŚÉļŖö "1ĒÜī ņČ®ņĀä" ļśÉļŖö "ņŚ░ņåŹ ņČ®ņĀä" ļ▓äĒŖ╝ņØä ņé¼ņÜ®ĒĢśņŚ¼ ņ×æņŚģņØä ņ×¼Ļ░£ĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
"ņé¼ņĀä ņĀĢņ¦Ć": "ņŚ░ņåŹ ņé¼ņØ┤Ēü┤" ļ▓äĒŖ╝ņØä ļŗżņŗ£ ļłäļź┤ņäĖņÜö. ņäżņ╣śļÉ£ ņĀ£ņ¢┤ ĒöäļĪ£ĻĘĖļשņŚÉ ļö░ļØ╝ ņČ®ņĀä ņןņ╣śļŖö Ēśäņ×¼ ņ¦äĒ¢ē ņżæņØĖ ņ×æļÅÖ ņé¼ņØ┤Ēü┤ņØä ņÖäļŻīĒĢśĻ│Ā ņŗ£ņ×æ ņ£äņ╣śņŚÉņä£ ļ®łņČźļŗłļŗż.
"ļ╣äņāü ņĀĢņ¦Ć": ļ╣©Ļ░äņāē "ļ╣äņāü ņĀĢņ¦Ć" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņČ®ņĀä ņןņ╣śĻ░Ć Ēśäņ×¼ ņ×æļÅÖ ņ£äņ╣śņŚÉņä£ ņ”ēņŗ£ ņĀĢņ¦ĆĒĢ®ļŗłļŗż. ņØ┤ ņĀĢņ¦Ć ļ░®ņŗØņØĆ ļ╣äņāü ņāüĒÖ®ņŚÉņä£ ņé¼ņÜ®ļÉ®ļŗłļŗż.

7 ĒĢśņŚŁ ņ×æņŚģ
ņżĆļ╣ä
ņō░ļĀłĻĖ░ņ░© ņØ┤ņÜ® ņŗ£ņŚÉļŖö ņĀüņ×¼ņ×æņŚģĻ│╝ ĒĢśņŚŁņ×æņŚģ ļæÉ Ļ░Ćņ¦Ć ņ×æņŚģņØ┤ ņ”ēņŗ£ ņØ┤ļŻ©ņ¢┤ņ¦Ćņ¦Ć ņĢŖņ£╝ļ»ĆļĪ£ ĒĢśņŚŁņ×æņŚģ ņŗ£ņŚÉļŖö ņ£ä 3.2.1ĒĢŁ ļ░Å 3.2.2ĒĢŁņØś ļ░®ļ▓ĢņŚÉ ļö░ļØ╝ ņ▓śņØīļČĆĒä░ ņ×æņŚģņŚÉ ļīĆĒĢ£ ņżĆļ╣äļź╝ ĒĢśļŖö Ļ▓āņØ┤ ņØ╝ļ░śņĀüņØ┤ļŗż.
ĒĢśņŚŁ
"ļĪ£ļŹö ļ”¼ĒöäĒŖĖ" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ļĪ£ļŹöĻ░Ć ļōżņ¢┤ ņś¼ļĀżņ¦ĆĻĖ░ ņŗ£ņ×æĒĢ®ļŗłļŗż. ļĪ£ļŹöĻ░Ć ņĀ£ņ×Éļ”¼ņŚÉ ļōżņ¢┤ ņś¼ļĀżņ¦ä Ēøä "ļĪ£ļŹö ļ”¼ĒöäĒŖĖ" ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ļĪ£ļŹöĻ░Ć ļŹö ņØ┤ņāü ņś¼ļØ╝Ļ░Ćņ¦Ć ņĢŖņŖĄļŗłļŗż. "ĒæĖņŗ£ ĒöīļĀłņØ┤ĒŖĖ ĒæĖņŗ£ ņĢäņøā" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ĒæĖņŗ£ ņģöļĖöņØ┤ ņō░ļĀłĻĖ░ļź╝ ļÆżļĪ£ ļ░Ćņ¢┤ļāģļŗłļŗż. ņō░ļĀłĻĖ░Ļ░Ć ņÖäņĀäĒ׳ ļ░ĆļĀżļéśļ®┤ "ĒæĖņŗ£ ĒöīļĀłņØ┤ĒŖĖ ĒæĖņŗ£ ņĢäņøā" ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ĒæĖņŗ£ ņģöļĖöņØ┤ ļŹö ņØ┤ņāü ļ░Ćņ¢┤ļé┤ņ¦Ć ņĢŖņŖĄļŗłļŗż.
ņ×öņŚ¼ ņō░ļĀłĻĖ░Ļ░Ć ņ׳ļŖö Ļ▓ĮņÜ░, "ĒæĖņŗ£ ĒöīļĀłņØ┤ĒŖĖ ĒøäĒć┤" ļ▓äĒŖ╝ņØä ļłäļź┤Ļ│Ā ĒæĖņŗ£ ņģöļĖöņØä ņ×Āņŗ£ ĒøäĒć┤ņŗ£Ēé© Ēøä "ĒæĖņŗ£ ĒöīļĀłņØ┤ĒŖĖ ĒøäĒć┤" ļ▓äĒŖ╝ņØä ļåōĻ│Ā "ĒæĖņŗ£ ĒöīļĀłņØ┤ĒŖĖ ļ░Ćņ¢┤ļé┤ĻĖ░" ļ▓äĒŖ╝ņØä ļłīļ¤¼ ņ×öņŚ¼ ņō░ļĀłĻĖ░ļź╝ ļ░Ćņ¢┤ļāģļŗłļŗż. ņō░ļĀłĻĖ░ļź╝ ļ░Ćņ¢┤ļé┤Ļ│Ā Ļ║╝ļéĖ ĒøäņŚÉļŖö ĒæĖņŗ£ ņģöļĖöņØä ņō░ļĀłĻĖ░ĒåĄ ļÆżņ¬Į(ņĢĮ 500mm ĒøäĒć┤)ņŚÉ ĻĘĖļīĆļĪ£ ļæÉņäĖņÜö.
ņō░ļĀłĻĖ░ļź╝ ļé┤ļ”░ Ēøä, ĒĢäļ¤¼ ļ▓äĒéĘņŚÉ ņ×öņŚ¼ ņō░ļĀłĻĖ░Ļ░Ć ļé©ņĢä ņ׳ņØä Ļ▓ĮņÜ░, ņ║Ī Ēī©ļäÉņØś "ņ▓Łņåī" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ Ļ░ĆņĢĢ ņČ®ņĀä ļ®öņ╗żļŗłņ”śņØ┤ "1 ņé¼ņØ┤Ēü┤"ņØä ņłśĒ¢ēĒĢśņŚ¼ ĒĢäļ¤¼ ļé┤ļČĆņØś ņō░ļĀłĻĖ░ļź╝ ņ▓ŁņåīĒĢ®ļŗłļŗż.
"ĒĢäļ¤¼ ļé┤ļ”¼ĻĖ░" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ĒĢäļ¤¼Ļ░Ć ļé┤ļĀżĻ░æļŗłļŗż. ĒĢäļ¤¼Ļ░Ć ņĀ£ņ×Éļ”¼ņŚÉ ļōżņ¢┤Ļ░ĆĻ│Ā ņ×ĀĻĖł ĒøäĒü¼Ļ░Ć ņ×ĀĻĖ░ļ®┤ "ĒĢäļ¤¼ ļé┤ļ”¼ĻĖ░" ļ▓äĒŖ╝ņØä ļåōņ£╝ņäĖņÜö. ĒĢäļ¤¼ņØś "ĒĢäļ¤¼ ļé┤ļ”¼ĻĖ░" ņ×æļÅÖņØ┤ ļ®łņČöĻ│Ā ņō░ļĀłĻĖ░ ļ░░ņČ£ ņ×æņŚģņØ┤ ņÖäļŻīļÉ®ļŗłļŗż.

8 ļ▓äĒéĘ ļ®öņ╗żļŗłņ”ś ņ×æļÅÖ
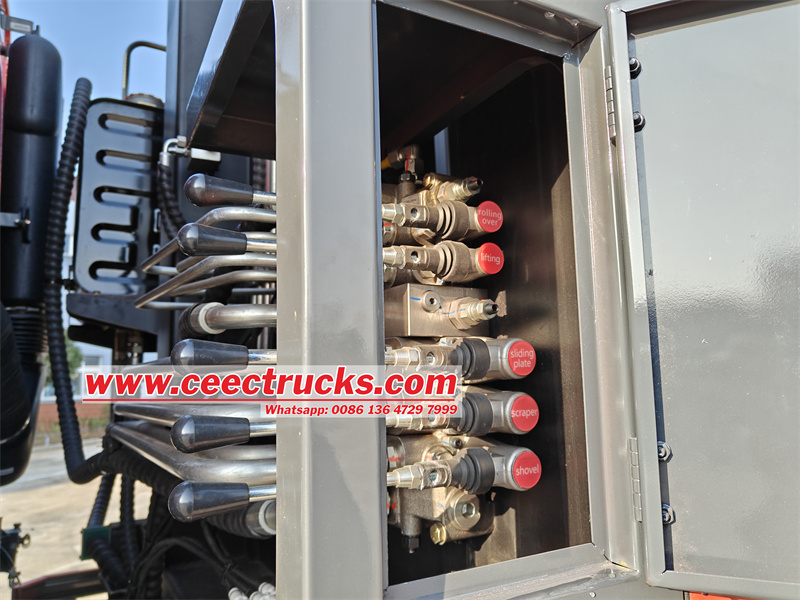
ļ▓äĒéĘ, ļ▓äĒéĘ, ļ▓äĒéĘ ļ”¼ĒöäĒīģ ļ®öņ╗żļŗłņ”śņØĆ ļ¬©ļæÉ Ēøäļ®┤ ņĀ£ņ¢┤ĒīÉņŚÉņä£ ņĪ░ņ×æĒĢśļ®░, ļ▓äĒéĘ ĒÜīņĀä ļ░Å ļ▓äĒéĘ ĒĢśņŚŁ ņåÉņ×ĪņØ┤ļŖö Ļ│ĄņÜ®ņ×ģļŗłļŗż. ļ▓äĒéĘ ĒÜīņĀä ļ░Å ļ▓äĒéĘ ĒĢśņŚŁ ļ▓äĒŖ╝ņØĆ ņ×ÉļÅÖ ļ”¼ņģŗ ņåÉņ×ĪņØ┤ļź╝ ņé¼ņÜ®ĒĢ®ļŗłļŗż.
ņō░ļĀłĻĖ░ĒåĄņØä Ļ▒Ė ļĢīļŖö "ņ£ä" ņåÉņ×ĪņØ┤ļź╝ ļÅīļĀż ĒøäĒü¼Ļ░Ć ņō░ļĀłĻĖ░ĒåĄņØä ļŗ©ļŗ©Ē׳ Ļ│ĀņĀĢĒĢśļÅäļĪØ ĒĢ£ ļŗżņØī, ņō░ļĀłĻĖ░ĒåĄņØ┤ ņĀ£ņ×Éļ”¼ņŚÉ ĻĖ░ņÜĖņ¢┤ņ¦ł ļĢīĻ╣īņ¦Ć "ņ£ä" ņåÉņ×ĪņØ┤ļź╝ ļÅīļ”Įļŗłļŗż. ņō░ļĀłĻĖ░ĒåĄ ņĢłņØś ņō░ļĀłĻĖ░ļź╝ Ļ║╝ļéĖ Ēøä "ņĢäļל" ņåÉņ×ĪņØ┤ļź╝ ļÅīļ”¼ļ®┤ ņō░ļĀłĻĖ░ĒåĄņØ┤ ĒÜīņĀäĒĢśļ®┤ņä£ ļ░öļŗźņŚÉ ļŗ┐ņĢä ĒøäĒü¼ņŚÉņä£ ļČäļ”¼ļÉĀ ļĢīĻ╣īņ¦Ć ņøÉņ£äņ╣śļĪ£ ļÅīņĢäĻ░æļŗłļŗż. ņō░ļĀłĻĖ░ĒåĄņØä Ļ║╝ļé┤ļ®┤ ņ×æņŚģņØ┤ ņÖäļŻīļÉ®ļŗłļŗż. ņō░ļĀłĻĖ░ĒåĄņØ┤ ņĀ£ņ×Éļ”¼ņŚÉ ĻĖ░ņÜĖņ¢┤ņĪīņØä ļĢī ņō░ļĀłĻĖ░ĒåĄņŚÉ ņō░ļĀłĻĖ░Ļ░Ć ļé©ņĢä ņ׳ņ£╝ļ®┤ "ņĢäļל" ņåÉņ×ĪņØ┤ļź╝ ļÅīļĀż ņō░ļĀłĻĖ░ĒåĄņØä ņ×Āņŗ£ ļÆżļĪ£ ļÅīļ”░ Ēøä, "ņ£ä" ņåÉņ×ĪņØ┤ļź╝ ļÅīļĀż ļŗżņŗ£ ĻĖ░ņÜĖņŚ¼ ņō░ļĀłĻĖ░ļź╝ Ļ║╝ļāģļŗłļŗż.
9 ņłśļÅÖ ņĀ£ņ¢┤
Ļ╝¼ļ”¼ ņĪ░ņ×æ ņāüņ×ÉņØś "ņłśļÅÖ ņĀ£ņ¢┤" ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ņ£äļĪ£ ĒÜīņĀäĒĢśĻ│Ā, ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ņĢäļלļĪ£ ļłīļ¤¼ņ¦ĆĻ│Ā, ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ņ£äļĪ£ ņøĆņ¦üņØ┤Ļ│Ā, ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ņĢäļלļĪ£ ņøĆņ¦üņØ┤ļÅäļĪØ ņłśļÅÖņ£╝ļĪ£ ņĀ£ņ¢┤ĒĢĀ ņłś ņ׳ņŖĄļŗłļŗż.
ņŖżĒü¼ļĀłņØ┤ĒŹ╝ ĒÜīņĀä: ņłśļÅÖ ļ¬©ļō£ņŚÉņä£ ņØ┤ ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ņ£äļĪ£ ĒÜīņĀäĒĢśĻ│Ā ņØ┤ ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ļ®łņČźļŗłļŗż.
ņŖżĒü¼ļĀłņØ┤ĒŹ╝ ļłäļź┤ĻĖ░: ņłśļÅÖ ļ¬©ļō£ņŚÉņä£ ņØ┤ ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ņĢäļלļĪ£ ļłīļ”¼Ļ│Ā ņØ┤ ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ņŖżĒü¼ļĀłņØ┤ĒŹ╝Ļ░Ć ļ®łņČźļŗłļŗż.
ņŖżņ╝ĆņØ┤Ēä░ ņŚģ: ņłśļÅÖ ļ¬©ļō£ņŚÉņä£ ņØ┤ ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ņ£äļĪ£ ņś¼ļØ╝Ļ░ĆĻ│Ā, ņØ┤ ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ļ®łņČźļŗłļŗż.
ņŖżņ╝ĆņØ┤Ēä░ ļŗżņÜ┤: ņłśļÅÖ ļ¬©ļō£ņŚÉņä£ ņØ┤ ļ▓äĒŖ╝ņØä ļłäļź┤ļ®┤ ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ņĢäļלļĪ£ ņøĆņ¦üņØ┤Ļ│Ā, ņØ┤ ļ▓äĒŖ╝ņØä ļåōņ£╝ļ®┤ ņŖżņ╝ĆņØ┤ĒŖĖļ│┤ļō£Ļ░Ć ļ®łņČźļŗłļŗż.

10 ņĀüņ×¼ ļ░Å ĒĢśņŚŁ ņ×æņŚģ ņóģļŻī
ņ£äņØś ņĀüņ×¼ ļ░Å ĒĢśņŚŁ ņ×æņŚģņØ┤ ņÖäļŻīļÉ£ ĒøäņŚÉļŖö ļŗżņØī ņ×æņŚģņØä ņł£ņä£ļīĆļĪ£ ņłśĒ¢ēĒĢ┤ņĢ╝ ĒĢ®ļŗłļŗż.
1. "ļĪ£ļō£" ļ▓äĒŖ╝ņØä ļłäļź┤ņäĖņÜö. ņ¢ĖļĪ£ļō£ ņ×æņŚģņŚÉļŖö ĻĘĖļ¤░ ļŗ©Ļ│äĻ░Ć ņŚåņŖĄļŗłļŗż.
2. ņ×æļÅÖ ņĀłņ░©ņŚÉ ļö░ļØ╝ ļÅÖļĀźļČäļ”¼ņןņ╣śļź╝ ļČäļ”¼ĒĢ®ļŗłļŗż.
3. ļ®öņØĖ ņĀ£ņ¢┤ĒīÉņØś "ņĀäņøÉ" ļ▓äĒŖ╝ņØä ĻĖĖĻ▓ī ļłīļ¤¼ ņĀäņøÉņØä ļüĢļŗłļŗż.


Whatsapp : +86 13647297999
ņØ┤ļ®öņØ╝ : tom@ceectrucks.com
Ēģö : +86 13647297999





























